
3D激光焊接跟踪工作原理
焊接跟踪传感器是利用激光3D焊缝跟踪传感器的三角反射式原理,得到激光扫描区域内各点的位置信息,通过软件算法完成对常见焊缝的在线实时检测。传感器关键部件包含:CCD摄像机和滤光片、半导体激光器和光学元件、监测温度的微处理器、存储的校准数据。激光器作为结构光源,以预定的角度将激光条纹投影到传感器下部的工件表面,以预定的角度将激光条纹投影到传感器下部的工件表面。摄像机直接观察在传感器下部的条纹。摄像机前部是一个光学滤光片,允许激光通过但是滤去所有其他的光,例如焊接电弧。
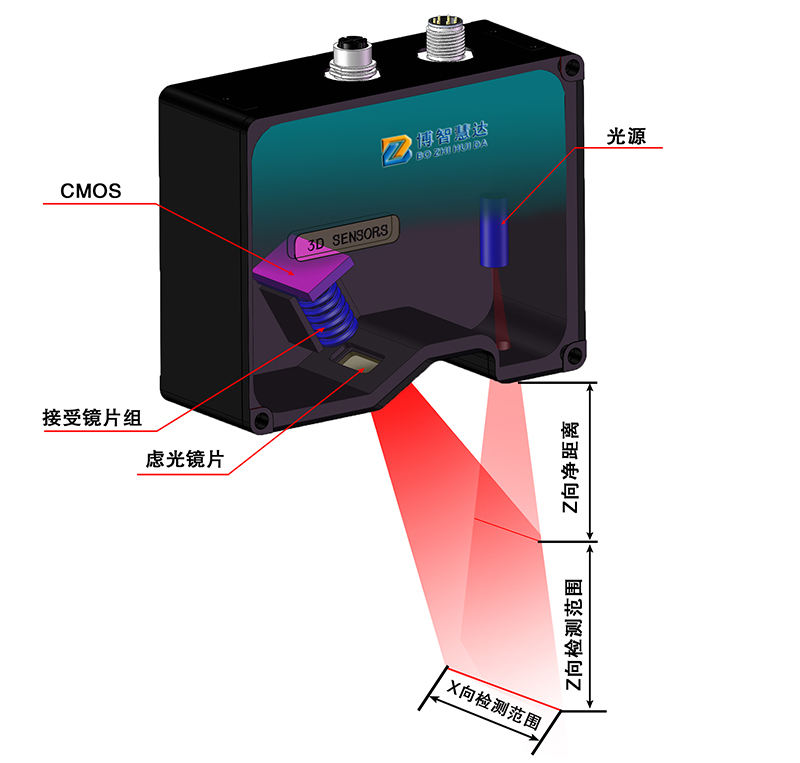
传感器前置于焊接头,提前检测焊缝左右偏移和高低偏移,并将焊缝走向实时传递到焊枪控制单元,完成各种复杂焊接,避免焊接质量偏差,实现无人化焊接。传感器本体到工件的距离也就是安装高度取决于所安装的传感器型号。当焊枪在焊缝上方正确的定位后,焊缝应该接近条纹的中心,这才能使得摄像机观察到激光条纹和焊缝。
温度监控器在冷却系统万一失效时对激光器提供保护。如果激光器在超过限度的温度下应用,则其寿命会显著地降低。
传感器必须通过焊接保护气体或者空气冷却(清洁、干燥和无油),将电子元件的温度维持在45℃以下,并且防止烟尘,保护光学元件。如果有必要可以使用一个水冷的安装板来对传感头提供额外冷却。反过来,如果半导体激光器的温度低于0℃,则可选加热器就应该安装在传感器上。
- 上一篇:焊缝跟踪在自动化焊接中有哪些方式?哪些优缺点? 2020/11/10
- 下一篇:焊缝跟踪是现代焊接技术的一个重要组成部分 2020/11/9