
苏州博智慧达LP系列激光轮廓传感器--测量精度最高0.2μm 精度高 速度快 易安装 非接触
还在使用传统检测手段?

特性
功能
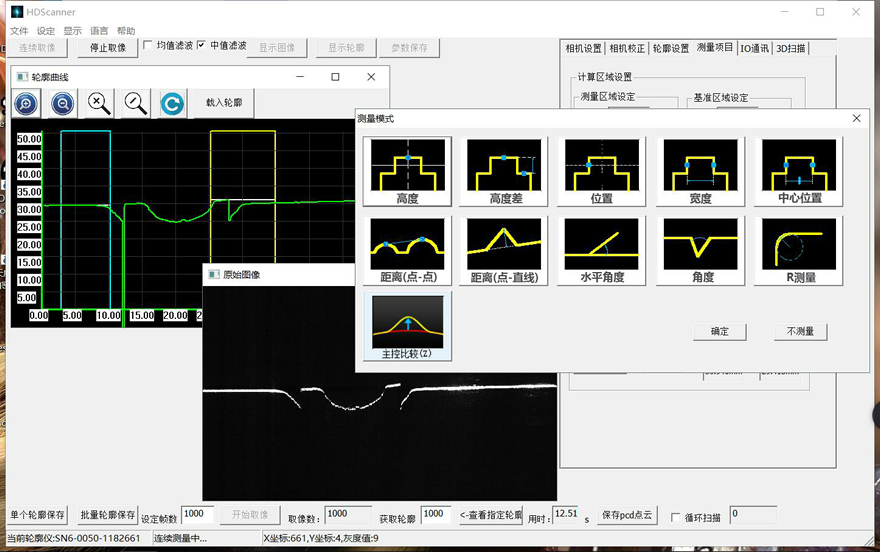
2D测量
★ 通过轮廓线实现物体形状测量,如高度差、宽度、角度、位置、半径等。
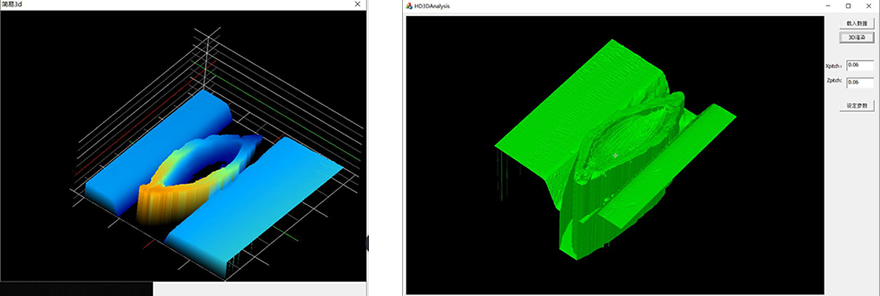
3D测量
★ 通过移动物体实现物体表面3D扫描,并保存为点云文件。
多样应用领域
★ 在线测量间距,轮廓,台阶,角度...
★ 缺陷检测、平面度检测
★ 轮廓跟踪、尺寸测量、3D扫描
★ 坚固耐用,适合生产线应用
★ 适用于机器人应用
★ 多种扫描应用
★ 适合集成商嵌入应用
先进的技术
★ 最高1280测量点每扫描线
★ 测量重复精度最高0.2µm
★ 位置补正消除倾斜误差
★ 可检测玻璃和高反光材料
★ 千兆以太网数据传输
★ 405nm蓝色激光
★ IP67防护等级
端口
★ 千兆比特Ethernet(GigEVision)
★ 触发和编码器输入
★ 测量开始、停止命令输入
★ 激光远程连锁输入
★ 多路模拟量和开关量输出单元(选配)
★ 通过Modbus输出测量数据(选配)
★ 与PLC实现直接通讯(选配)

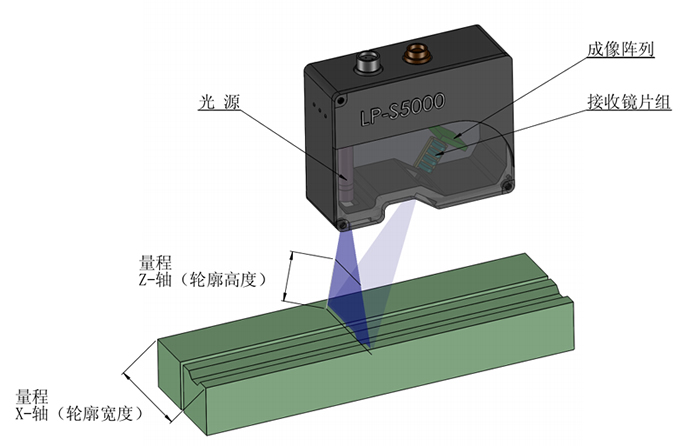
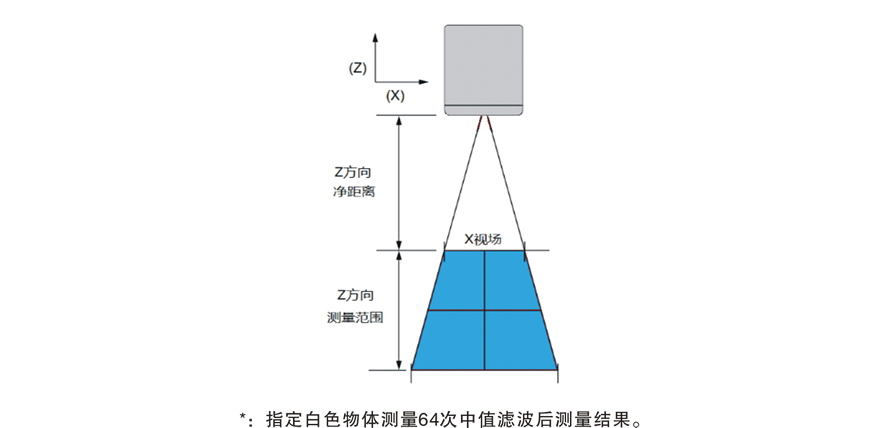
原理
激光轮廓传感器采用激光三角反射式原理:激光束被放大形成一条激光线投射到被测物体表面上,反射光透过高质量光学系统,被投射到成像矩阵上,经过计算得到传感器到被测表面的距离(Z轴)和沿着激光线的位置信息(X轴)。移动被测物体或轮廓仪探头,就可以得到一组三维测量值。

应用案例
3D曲面玻璃边缘弧形测量
传感器型号
LP-S5060
测量方法
★ 玻璃位于电动滑台上
★ 采用玻璃扫描模式
★ 直接得到曲面数据和文件
★ 保存为点云文件
测量优势
★ 平面透明物体检测
★ 曲面透明物体测量

芯片引脚品质测量
传感器型号
LP-S5050
测量方法
★ 使用高度差功能测量引脚高度
★ 使用宽度功能测量引脚间距
★ 设置宽度和高度范围
★ 检测异常报警
测量优势
★ 管脚翘曲、歪斜、缺失、连锡检测
★ 一次检测多管脚、效率高

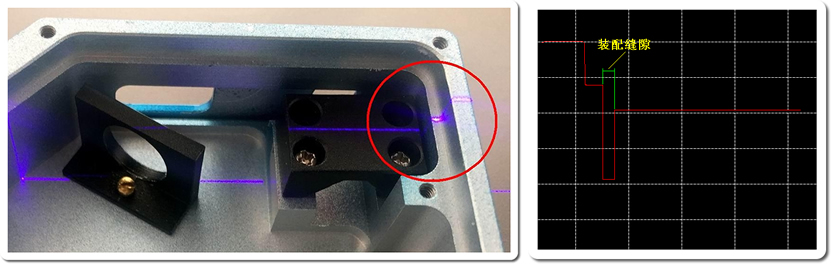
零件装配缝隙测量
传感器型号
LP-S5030
测量方法
★ 使用位置功能,得到壳体边缘位置
★ 使用角点功能,得到零件边缘位置
★ 使用缝隙功能测量壳体与零件的间距
★ 通过以太网实时发送测量结果
测量优势
缝隙检测,可在装配过程中实时测量反馈实现精密装配
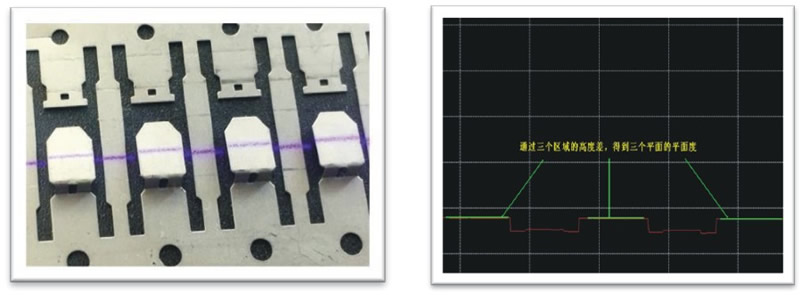
弹性表面平整度测量
传感器型号
LP-S5060
测量方法
★ 使用高度峰值与谷值功能,测量一片弹性钢片表面起伏状况
★ 多输出结果分别测量不同弹性钢片表面
★ 综合数据得到整体弹性表面的平整度
测量优势
弹性、软性材料的形状测量
液态材料的形状测量
软件
|
LP-MEASURE ★ 2D轮廓测量软件 ★ 48种测量模式 ★ 同时20点测量显示 ★ 数字端口输出结果 |

|
|
LP-3D STUDIO ★ 3D扫描软件 ★ 物体表面三维实时生成 ★ 保存点云文件 ★ 扫描过程中实时旋转缩放查看 |
|
|
LP-OPENTOOL ★ 软件二次开发包 ★ 包含所有测量功能 ★ C++\QT多程序兼容 ★ 集成商无缝嵌入 |
|
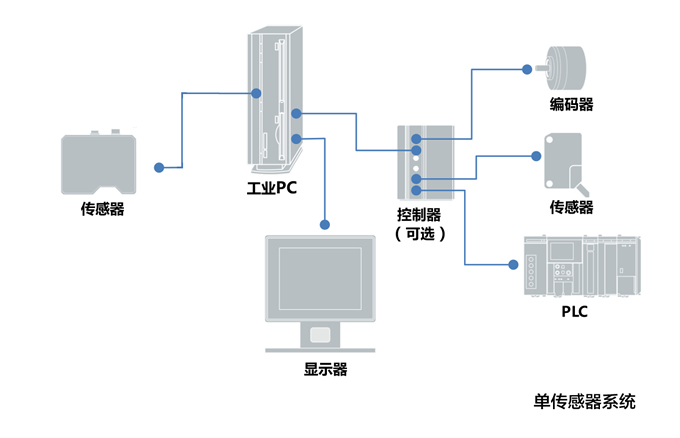
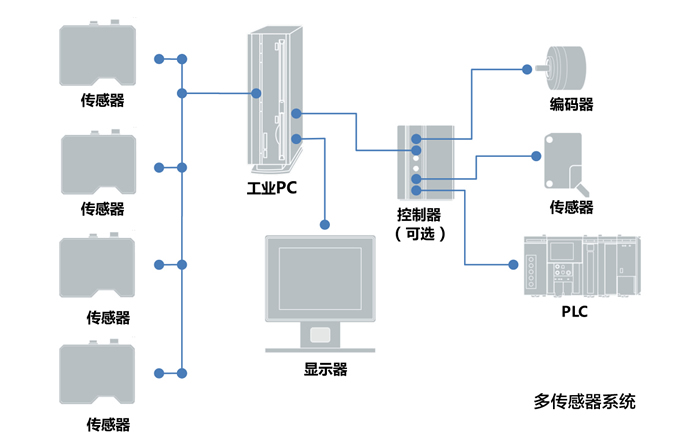
系统构成
规格
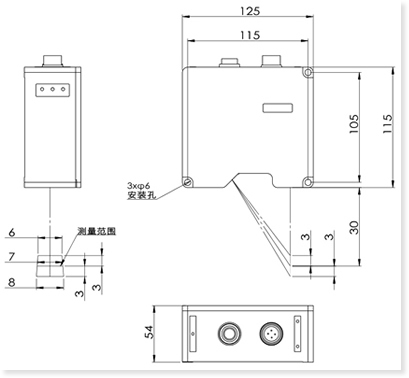
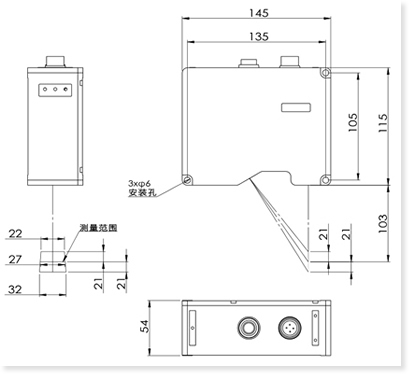
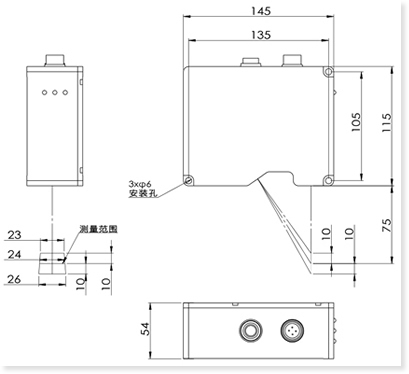
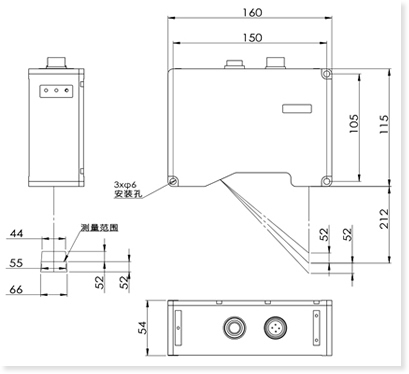
尺寸
| LP-S5030 | LP-S5060 | |
|
|
|
| LP-S5050 | LP-S5070 | |
|
|
|
| LP-S5080 | ||
|
标准配置 ★ 激光传感器 ★ 软件开发包与例程 ★ 网络线缆(长度3米) ★ 控制线缆(长度3米) |

|
- 上一篇:苏州博智慧达激光科技最新推出KT530激光焊缝跟踪传感器 检 2018/4/11
- 下一篇:激光传感器原理及其应用 2018/3/11