
激光轮廓传感器与CCD相机在自动化组装与应用中的优势对比
基于激光轮廓传感器的后盖装配优势
——laser Vs. camera
1.原理
1) 在环绕外框的6个位置,安装6台激光轮廓传感器
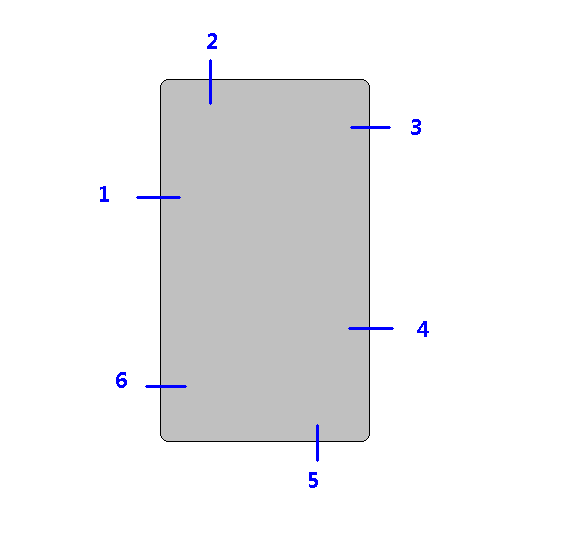
2) 每台传感器,测量后玻璃与金属框架槽的3D间隙数值,单位为微米
3) 根据6台传感器测量的缝隙数值,通过调整策略,使后玻璃在外框的安装位置居中。实现精密装配。
2.安装
激光传感器优势
l 无需标定
l 无需光源
l 不需调整镜头清晰度
l 即插即用
相机不足
l 需标定
l 需多套光源以及光源的安装调节机构
l 需调整镜头清晰度
l 安装繁琐
3.精度
激光传感器优势
l 真实3D缝隙测量
l 工作距离范围内缝隙测量重复精度均为±5微米
l 没有边缘拟合造成的误差
相机不足
l 相机测量3D物体引入误差:相机通过图像灰度的变化得到边缘位置,而实际边缘与图像灰度并不完全吻合,其受边缘倒角、表面材料反光特性、光源照射角度、光源平行度、环境光等多因素影响,引入误差。
l 镜头畸变引入工作距离误差:受镜头景深影响,标定板只在一个工作距离标定,无法消除其它工作距离的畸变。但是工作时无法保证工作距离等于标定距离,引起图像畸变,引入误差。
l 边缘拟合引入误差:通过图像得到一段边缘,并将边缘拟合为直线,求取平均距离。由于外框和玻璃边缘可能不是直线,造成拟合误差,在某些点偏离过大,引入测量误差。
4.稳定性
激光传感器优势
l 不受外界光线干扰
l 一体化设计,震动不会改变光路结构
l 不受产品颜色无干扰
l 无光源
l 真实3D缝隙测量
相机不足
l 基于亮度阈值算法,易受外界光线干扰
l 相机、镜头、光源分体安装,震动会改变光路结构,引起精度漂移
l 不同颜色壳体的变更,引入图像边缘亮度变化,引起精度漂移
l 光源颜色设置不当、光源亮度的缓慢衰减,持续引入精度漂移
l 相机不能得到3D信息,外框的结构细节的变化(如倒角)影响图像的位置判断,引起精度漂移
5.效率
激光传感器优势
l 同时检测框架和后玻璃
l 单一位置矫正工位,矫正后下压
l 效率更高
相机不足
l 分别检测框架和后玻璃
l 多次位置矫正工位(不同高度、不同光源),多次矫正
l 效率一般
6.其它
激光传感器优势
l IP54防护等级
l 布线简洁(2条线)
l 功耗低
l 更换传感器方便:即插即用
l 外框坚固,耐撞击
相机不足
l 无防护等级
l 布线繁琐(相机、光源、电源,多线阑)
l 功耗较大
l 更换部件复杂:都需要标定和调整
l 无外壳,不耐撞击
- 上一篇:博智慧达亮相无锡太湖国际机床及智能工业技术创新展览会 2018/10/24
- 下一篇:激光轮廓传感器如何对内存条金手指坡面高度进行检测 2018/6/21